 PAGE: "Reference | Application Handbook Viewer:: Harmonic Drive LLC"
PAGE: "Reference | Application Handbook Viewer:: Harmonic Drive LLC"
Manufacturing
Wafer-handling Robot
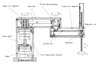
The novel aspect of this design example is that the Harmonic Drive® FHA hollow-shaft actuators used as primary axis drives are built into the base of the robot. The upper hollow-shaft actuator drives the first axis, which drives the upper arm segment. The high capacity output bearing of this actuator can support the whole weight of the robot arm. The lower actuator drives the second axis via a shaft passing through the hollow-shaft of the upper actuator. This is connected to the elbow joint by means of a pre-tensioned steel belt. The advantage of this solution is that by integrating both actuators in the robot base, the mass of the arm itself is reduced, further enhancing the dynamic performance of the robot. The cables are led inside the robot arm, which allows application of the whole system under clean-room conditions. An RS series mini servo actuator drives the rotational hand axis. Another interesting feature of this design is the incorporation of AC mini servo actuators inside the elbow joint of the robot arm.
 |