 PAGE: "Reference | Application Handbook Viewer:: Harmonic Drive LLC"
PAGE: "Reference | Application Handbook Viewer:: Harmonic Drive LLC"
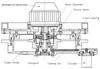
6-Axis Robot
The high torque capacity and compact design, which are characteristic of Harmonic Drive® strain wave gears, make them well suited for applications in the base axes of 6-axis robots. In this design example, the motor drives the Wave Generator of a CSF component set via a separately supported input shaft. The Circular Spline is the fixed element and the Flexspline is the output element. In this particular case, the robot is supported by a gantry and operates upside-down. A large 4-point bearing supports the robot body. An absolute encoder, driven via a toothed belt from the output side of the gear, is used for position measurement. This arrangement enables the output position of the axis to be measured, even after a power failure.
 |